完整独立的软件用于采集、后处理和成图
高效、准确的工具
能够处理大数据
强大而快速的多波束校准工具,可组合在处理模块中或单独使用
采集后处理集成式开发,一套软件两种模块
3D 多波束数据编辑与3D DTM和CUBE编辑器的组合
内置SVP声速剖面编辑器
水柱数据可视化
PDS 后处理软件
•内置3D多波束区域编辑器,带自动过滤及CUBE算法、DTM模型
•CUBE 和DTM 模型,3D 编辑和插值功能
•CUBE 和 DTM 模型在编辑多波束条带数据时实时更新,具有交互式滤波和自动滤波等水深交互式编辑功能,支持国际航道组织(IHO)的INT1 和 INT2规范
•导航编辑器可手动和自动编辑航线
•校正工具可检视多波束安装偏差和传感器的测量偏差;可编辑声速资料,以光速追踪算法对声速进行校正
•船只配置编辑器可编辑感应器位置和偏差(传感器精度)
•剖面输出ASCII 和图片、实时三维地形模型显示、数据回放等
•软件具备控制界面,有大地测量程序,具备计划测线及各种编辑器功能
•条带编辑、和三维点云编辑;支持多种格式的声速剖面和潮位文件导入处理;支持导航、姿态、声速数据时间序列显示和编辑
•支持水深自动过滤功能;支持水深异常起伏分析处理功能
•子区编辑器支持对带地理参考的水深数据进行编辑,可显示彩色水深标准差数据、等深图,可对水深数据进行统计分类
•潮位数据改正
•校准编辑器可对横摇Roll、纵摇Pitch、艏摇Yaw、升沉和时间延迟Latency以图表方式展示和交互编辑
•多波束水深、侧扫声呐图像、底质分类数据的显示和处理•支持3D 视图进行检视
PDS 采集软件
支持GNSS接收机、姿态仪、单波束测深仪、多波束测深仪、侧扫声呐、动态三维激光扫描仪等设备的数据采集功能;支持采集后向散射时间序列和每波束强度功能
•导航图支持:DXF文件,C-MAP,S57海图,Tresco图,Geotiff,用户定义图
•能加载PDS, XTF, XYZ, ALL和ATLAS, Furuno, GSF, LADS, Seabeam/Elac, Simrad, UNB, XTF, C3D, Imagenex, C-MAX, Coda, Edgetech, MarineSonfics, QMIPS, SEG-Y等常见多波束数据
•具备实时单波束和多波束屏蔽功能
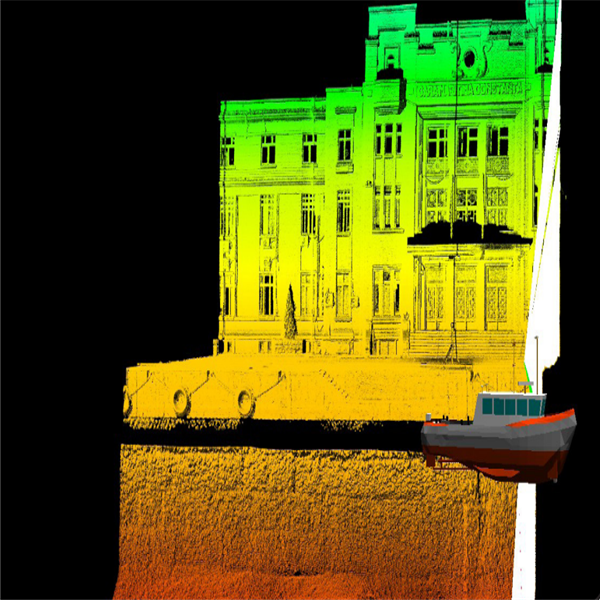
•支持三维点云显示和水柱视图显示功能
•支持远程显示客户端功能(局域网/广域网/广播)
•设备、日志和警报的状态视图,数据的可视化显
•具备设备工作参数以及GNSS数据、姿态数据、声速数据等辅助设备数据存储功能
接口
GNSS定位系统、罗经姿态传感器
•1PPS 时间秒脉冲同步接口
•侧扫声呐
•表面声速仪
•单波束测深仪和多波束测深仪
•三维激光扫描仪
•潮位数据(潮位仪)
•磁力仪
•可配置的输入/输出,按要求接入其他设备
计划路线,跟踪指导线,航点
•可同时读取多个DXF图
•数字地形模型
•3D 设计TIN模型
•3D 设计模型建立多边形和 3D-DXF 文件
•使用另一个DTM 的设计
•用户自定义的图表
成图
功能强大的工具用于生成图表
•多个视图和多个配置文件
•等深线
•文本、说明和图像
•剖面绘制(快速断面绘图、批处理绘图等)
•支持多种图像格式的输入和输出:TIFF、DXF、DGN、 E00和DLG等格式
体积计算
土方计算、数据输出、报告生成
•土方计算(水下地形):DTM格网法、断面法、等高线法等计算体积设计模型:
•剖面设计
•3D TIN 模型和 3D dxf 格式
•可消除冗余数据,创建数字地形模型DTM和等深线
•可生成彩色DTM栅格图像,可手动设置光照和阴影效果
•地形差异计算:水深数据与DTM 或 DTM与DTM
-